
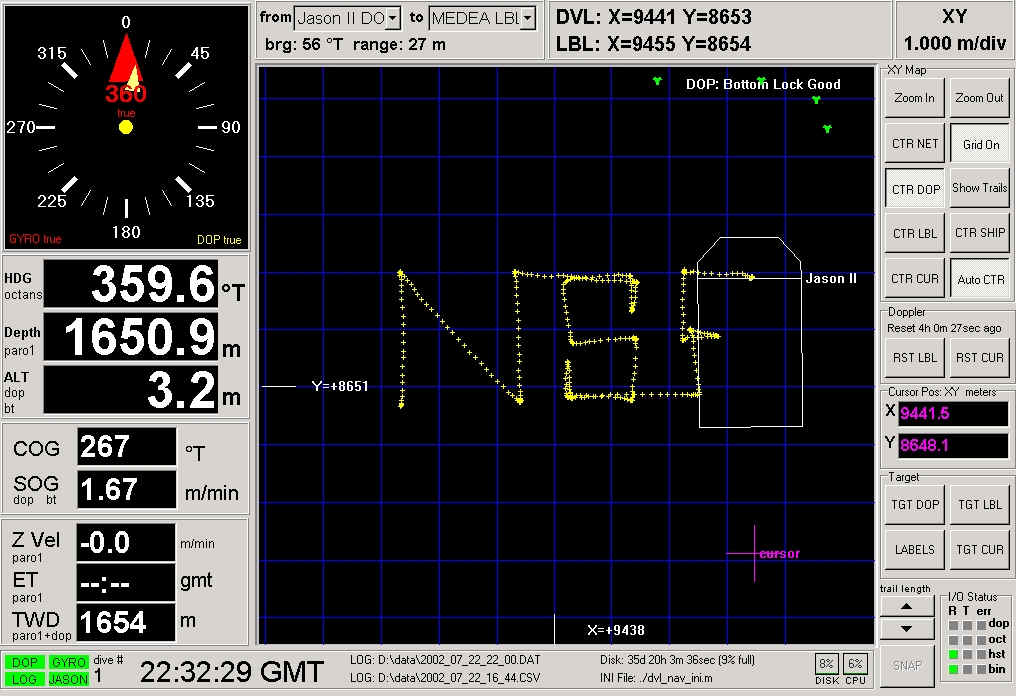
DVLNAV is an interactive program for precision 3-D navigation of underwater vehicles, developed by researchers at the Johns Hopkins University and the Woods Hole Oceanographic Institution. DVLNav employs a bottom-lock Doppler sonar and a North-seeking gyro to compute accurate vehicle XYZ displacements in a true—North coordinate grid, and is equipped to initialize the bottom track witherfrom a Long-Baseline acoustic navigation system or from manual input. The navigation software, supported under Windows, provides an interactive user-interface providing real-time displays of all sensor information, sensor status indicators, and a moving map-display with real-time vehicle outline, shown in Figure 1.
DVLNav displays vehicle positions in XY, Universal Transverse Mercator (UTM), or Latitude/longitude coordinates. Sensor status screens provide detailed status of each serial sensor device. All sensor data and vehicle navigation data is automatically time-stamped and logged to ascii-readable data files. DVLNAV was first deployed on the 6000m remotely operated vehicle DSL120A, the 6500m remotely operated vehicle JASON II and on the 4500m inhabited submersible DSV Alvin, both developed and operated for the U.S. oceanographic research community by the Woods Hole Oceanographic Institution. DVLNAV is also deployed on the JHU ROV developed at JHU’s Dynamical Systems and Control Laboratory.
The system presently supports a variety of navigation sensors including:
- RDInstruments Workhorse Navigator Doppler.
- IXSEA OCTANS North-seeking fiber-optic gyro.
- Paroscientific pressure depth sensor.
- Long-baseline acoustic navigation.
- Crossbow AHRS Attitude and Heading Reference Systems.
- Various additional NMEA navigation and oceanographic sensors such as altimeters, CTD, etc.
DVLNAV Data Log Files
Contents
DVLNAV produces FOUR types of data files:
- Simple comma-delimited 1-second data file: .CSV suffix, logs time-stamped navigation and sensor data at 1 second intervals. One file per day. 1 MB/hour. Compresses 5:1. Loads directly into spreadsheets (Excel, Quattro Pro, etc.) (Example file)
- Comprehensive DSL Format Data file: .DAT suffix, logs ALL sensor and processed data, timestamped to 0.001 second. One file per hour, 60 MB/Hour. Compresses 10:1. Requires AWK/GREP and MATLAB to process. Supports planned renavigation capability. (Example file)
- Screen Shot JPEG File: .JPEG suffix. Timestamped (to the second) screen shot image of the DVLNAV screen. 500 KB/Image. Created when you press the “screenshot” button. Press the button, Max! (Example File)
{kind=link}
- Hourly system configuration (INI file): Logs DVLNAVinternal configuration once an hour. 6 KB. (Example file)
The file format specifications are available here, see below.
Download the DVLNAV Program and Related Documents
DVLNAV is free to the UNOLS oceanographic research community and use in non-commercial academic research projects. We like to keep track of who is using DVLNAV, so if you download DVLNAV as a courtesy we request that you let us know who you are and how you will be using DVLNAV. An email to Louis Whitcomb, “llw@jhu.edu”, will do.
You can install DLVNAV on your PC and run it in simulation mode to get a sense of what the program looks like when you are actually at Sea with an ROV or Alvin. In an upcoming release, you will be able to play-back and re-navigate logged dive data.
Current Version
V193
(October 19, 2005) DVLNAV Version 193: Program installation files (3MB) only as a self-extracting compressed executable containing a windows setup.exe to automatically install dvlnav on your computer. We recommend doing the automatic windows installation (above) but if you want to do a manual installation instead of the manual installation (you must know how to manually register OCX files to do this successfully), then download the zipped manual installation files.
- Self-extracting exe for with setup.exe installation (recommended)
- Zip archive of all files and documents for manual installation (not recommended)
- DVLNAV manual
- Quick Reference
- FAQ
- Data formats (Version 54, Revised October 19, 2005)
Previous Versions
V176
(September 30, 2003) DVLNAV Version 176: Program installation files (3MB) only as a self-extracting compressed executable containing a windows setup.exe to automatically install dvlnav on your computer. We recommend doing the automatic windows installation (above) but if you want to do a manual installation instead of the manual installation (you must know how to manually register OCX files to do this successfully), then download the zipped manual installation files.
- Self-extracting exe for with setup.exe installation (recommended)
- Zip archive of all files and documents for manual installation (not recommended)
- DVLNAV manual
- Quick Reference
- FAQ
- Data formats (Version 45, Revised November 22, 2003)
V171
(April 12, 2003) DVLNAV Version 171: Program installation files (3MB) only as a self-extracting compressed executable containing a windows setup.exe to automatically install dvlnav on your computer. We recommend doing the automatic windows installation (above) but if you want to do a manual installation instead of the manual installation (you must know how to manually register OCX files to do this successfully), then download the zipped manual installation files.
- Self-extracting exe for with setup.exe installation (recommended)
- Zip archive of all files and documents for manual installation (not recommended)
- DVLNAV manual
- Quick Reference
- FAQ
- Data formats
V167
(Sept. 24, 2002) DVLNAV Version 167: Program installation files (3MB) only as a self-extracting compressed executable containing a windows setup.exe to automatically install dvlnav on your computer. We recommend doing the automatic windows installation (above) but if you want to do a manual installation instead of the manual installation (you must know how to manually register OCX files to do this successfully), then download the zipped manual installation files here.
- DVLNAV Version 167: Program installation files
- DVLNAV Version 167 Individual documents only: Installation and setup manual (revised for this version.) The following documents have not changed in this version data format documentation, quick reference sheet, FAQ sheet.
- For additional documents on Doppler configuration files, and full documents for RDI Dopplers, Octans Gyros, Paroscientific Pressure sensors, crossbow gyros, and Adobe acrobat, download the full57MB V166 release.
V166
(August 6, 2002) DVLNAV Version 166 Full Release (57MB) Full installation for Windows 2000. Zip archive including the dvlnav program, data format document, installation document, and Doppler configuration files, and full documents for RDI Dopplers, Octans Gyros, Paroscientific Pressure sensors, crossbow gyros, and Adobe acrobat.
- DVLNAV Version 166 Full Release
- DVLNAV Version 166: Program installation files (3MB) only as a self-extracting compressed executable.
- Installation and setup manual
- Quick Reference
- FAQ
- Data formats
V159
(May 1, 2002) DVLNAV Version 159 Alvin Release Full installation for Windows 2000. Includes data format document, installation document, and Doppler configuration files.
- DVLNAV Version 159 Alvin Release
- DVLNAV Version 159 Data Log and Data I/O Format Document
- DVLNAV Version 159 Installation Manual in PDF Format
Planned DVLNAV Enhancements
- User manual
- Renavigation capability (so you can play back your dive data logs)
- Improved LBL/Doppler navigation algorithms
- Improved LBL capabilities
Contributors
- The principal Authors of DVLNAV are Professor Louis Whitcomb, and JHU DSCL Ph.D. Alumnus James Kinsey of the Dynamical Systems and Control Laboratory, Department of Mechanical Engineering, Johns Hopkins University. Dr. Kinsey is now Assistant Scientist, Applied Ocean Physics and Engineering Department, Woods Hole Oceanographic Institution.
- Dana Yoerger Ph.D., Senior Scientist and Director of the Deep Submergence Lab, Department of Applied Ocean Physics and Engineering, Woods Hole Oceanographic Institution, who got us all interested in Doppler navigation in the first place, and who graciously provided the LBL solution code that heoriginally developed for ABE for use in DVLNAV.
- Current and former WHOI National Deep Submergence Facility personnel, all of the Department of Applied Ocean Physics and Engineering, Woods Hole Oceanographic Institution, who provided invaluable collaboration in defining the original DVLNAV functional specification, and providing continuous feedback and critical insight through many revisions of the system.
- Alvin Group pilots, expedition leaders, and engineers including Pat Hickey, Bruce Strickrott, Blee Williams, Anthony Berry, Mark Spear, Patrick Hickey, Anthony Tarantino, Gavin Eppard, Bob Brown, and Dudley Foster
- Jason Group pilots, expedition leaders, and engineers including Matt Heintz, Will Sellers, Chris Taylor, Dara Scott, Casey Agee, Phil Forte, Alberto Collasius Jr., Bob Waters, Will Handley, Jim Varnum, and Akel Kevis-Stirling.
- Andy Bowen, Director of the WHOI National Deep Submergence Facility, Department of Applied Ocean Physics and Engineering, Woods Hole Oceanographic Institution, for having the faith that we could make this work on Jason and the other DSL ROVs.
- Barrie Walden, former Director of the Alvin Group, Department of Applied Ocean Physics and Engineering, Woods Hole Oceanographic Institution, provided the leadership to make the Alvin Doppler program a reality supported by NSF.
- Hanumant Singh Ph.D., Associate Scientist, Department of Applied Ocean Physics and Engineering, Woods Hole Oceanographic Institution facilitated our initial collaboration with the Alvin group.
- Dan Fornari Ph.D., Senior Scientist, Department of Geology and Geophysics, Woods Hole Oceanographic Institution, for leading the charge to obtain and deliver quantitative scientific data with deep submergence vehicles.
References
- James C. Kinsey* and Louis L. Whitcomb. Preliminary Field Experience with the DVLNAV Integrated Navigation System for Manned and Unmanned Submersibles. Proceedings of the 1st IFAC Workshop on Guidance and Control of Underwater Vehicles, GCUV ’03, 9-11 April 2003, Newport, South Wales, UK. Accepted, To Appear.
- James C. Kinsey* and Louis L. Whitcomb. Towards In-Situ Calibration of Gyro and Doppler Navigation Sensors for Precision Underwater Vehicle Navigation. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation, Pages 4016-4023, Arlington, VA, May 2002.
- Hanumant Singh, Louis L. Whitcomb, Dana Yoergar, and Oscar Pizarro. Microbathymetric Mapping from Underwater Vehicles in the Deep Ocean. Computer Vision and Image Understanding, 79(1):143-161, July 2000.
- Robert D. Ballard, Lawrence E. Stager, Daniel Master, Dana Yoerger, David Mindell, Louis L. Whitcomb, Hanumant Singh, Dennis Piechota. Iron Age Shipwrecks in Deep Water off Ashkelon, Israel. American Journal of Archaeology, 106(2):151-168, March 2002.
- Robert D. Ballard, Anna Marguerite McCann, Dana R. Yoerger, Louis L. Whitcomb, David A. Mindell, John Oleson, Hanumant Singh, Brendan Foley, Jonathan Adams, Dennis Picheota, and Cathy Giangrande. The discovery of ancient history in the deep sea using advanced deep submergence technology. Deep Sea Research Part 1, 47(9):1591-1620, September 2000.
- Louis L. Whitcomb, Dana R. Yoerger, Hanumant Singh, and Jonathan Howland. Advances in underwater robot vehicles for deep ocean exploration: navigation, control, and survey operations. In Robotics Research – The Ninth International Symposium, Springer-Verlag, London, 2000, (To Appear).
- Louis L. Whitcomb, Underwater Robotics: Out of the research laboratory and into the field. In Proceedings of the IEEE International Conference on Robotics and Automation, pages 709-716, April 2000.
- Hanumant Singh, Oscar Pizarro, Louis L. Whitcomb, Dana Yoerger, In-situ attitude calibration for high resolution bathymetric surveys with underwater robotic vehicles. In Proceedings of the IEEE International Conference on Robotics and Automation, pages 1767-1774, April 2000,
- Louis Whitcomb, Dana R. Yoerger, and Hanumant Singh. Combined Doppler/LBL Based Navigation of Underwater Vehicles. In Proceedings of the 11th International Symposium on Unmanned Untethered Submersible Technology, Durham, New Hampshire, USA, August 1999.
- Louis L. Whitcomb, Dana R. Yoerger, and Hanumant Singh. Advances in doppler-based navigation of underwater robotic vehicles. In Proceedings of the IEEE International Conference on Robotics and Automation, volume 1, pages 399-406, May 1999.
- Louis L. Whitcomb and Dana R. Yoerger. A new distributed real-time control system for the Jason underwater robot. In Proceedings of the IEEE/RSJ International Workshop on Intelligent Robots and Systems, volume 1, pages 368-374, Yokohama, Japan, July 1993. IEEE.
- David A. Mindell, Dana R. Yoerger, Lee E. Freitag, Louis L. Whitcomb, and Robert L. Eastwood. JasonTalk: A standard ROV vehicle control system. In Proceedings of IEEE/MTS OCEANS’93, volume 3, pages 253-258, Victoria, BC, Canada, October 1993. IEEE.