
Description
Contents
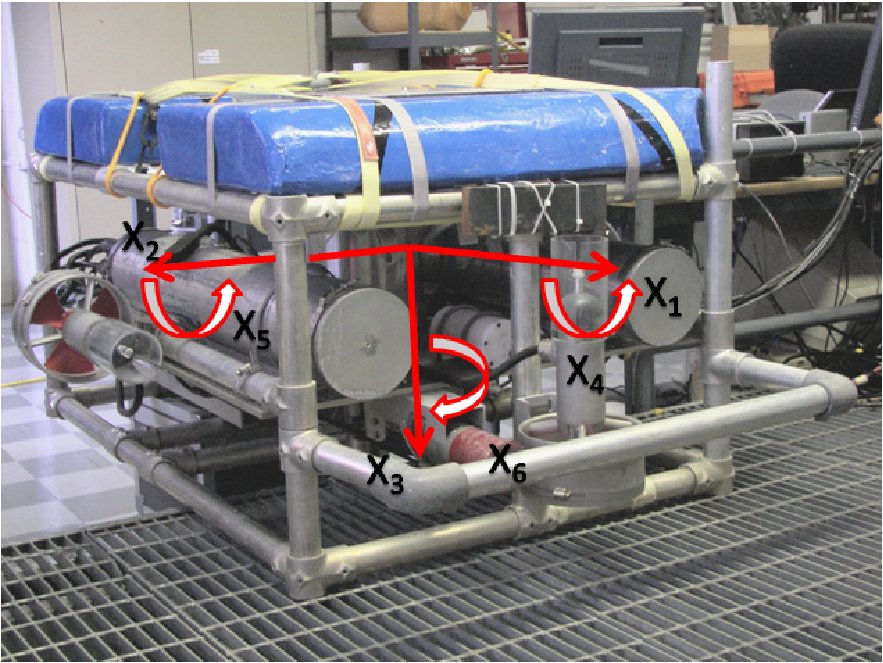
The Johns Hopkins University Remotely Operated underwater robotic Vehicle (JHUROV) is an uninhabited, tethered research testbed underwater robot. It’s purpose is to serve as an experimental test platform for research in the areas of underwater vehicle dynamics and control, underwater navigation, and marine thrusters. The dry mass of the vehicle is 240 kg. It measures 1.37 m long, 0.85 m wide, and 0.61 m high. The JHUROV is configured with six thrusters that produce force and torque to enable active control in all 6-DOF. The vehicle has two longitudinal thrusters, two lateral thrusters, and two vertical thrusters.
Sensor Suite
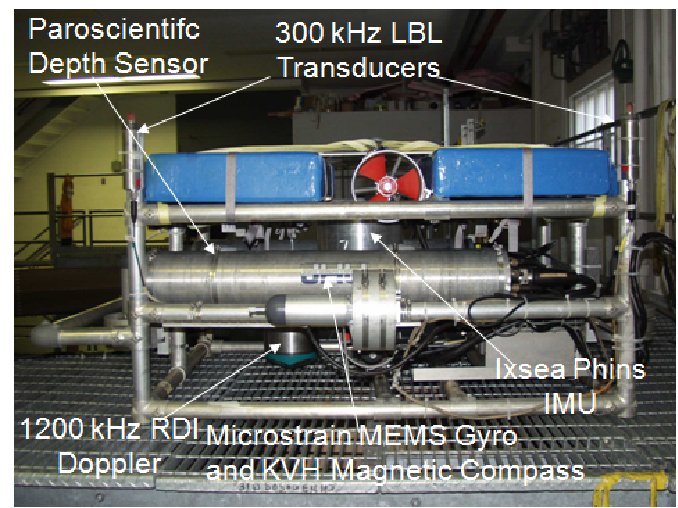
The JHUROV is equipped for full 6-DOF position measurement. A description of the parameters measured identified in the photograph to the right are:
- KVH ADGC gyro-stabilized magnetic compass measures roll, pitch, heading,
- Microstrain 3DM-GX1 and 3DM-GX3-25 gyro-stabilized magnetic compass measures roll, pitch, heading, and angular body velocities
- IXSEA Phins North-seeking three-axis fiber-optic gyrocompass measures roll, pitch, heading, and angular body velocities
- SHARPS 300 kHz time-of-flight acoustic navigation system in conjunction with the Paroscientific depth sensor measures vehicle XYZ position.
- Paroscientific 10 meter range depth sensor measures depth.
- 1200 kHz Doppler Sonar provides XYZ body velocity measurements and, in combination with the gyrocompasses and depth sensor, enables Doppler navigation via the DVLNAV software program.
Designers/Collaborators
Dr. Louis L. Whitcomb, David Smallwood, Dr. Ralf Bachmayer, Dr. Dan Stilwell, Dr. James Kinsey, Dr. Stephen C. Martin, Ms. Sarah Webster, Mr. Giancarlo Troni, Mr. Christopher McFarland, and Ms. Amy Blank
Acknowledgements
USNA Hydromechanics Lab: THE USNA hydromechanics lab has been a gracious host of several of our deployments, allowing us to conduct our research in collaboration with USNA faculty in their first rate facilities.
Woods Hole Oceanographic Institute (WHOI) Deep Submergence Lab (DSL) : Dr. Dana Yoerger, Dr. Hanuman Singh, and Mr. Andy Bowen are all members of the WHOI DSL who have all graciously supplied on loan several key sensors that make the JHUROV navigation system possible. Dr. Yoerger has lent the JHUROV his 300 kHz SHARPS system, Dr. Singh has lent the JHUROV his Paroscientific depth sensor and IXSEA Phins North-seeking three-axis fiber-optic gyrocompass, and Mr. Andy Bowen has lent his IXSEA Octans unit to the JHUROV. Their contributions to the JHUROV are greatly appreciated.